信息中心


鼓式制動器、摩托車剎車圈、Drum brake、輪轂剎車圈專業生產廠家無錫九環2021年4月22日訊再生制動功能為新能源車型必備功能,可有效提高新能源車輛續航里程。電控制動助力器應用于新能源車輛可提供再生制動工況制動踏板力協調功能,使得駕駛員所感受的踏板力跟傳統真空助力器車型相似。再生制動工況踏板力補償依賴于制動系統pV曲線,通過建立協調式再生制動系統的物理模型,運用軟件自學習算法,調整軟件內部預設的駕駛員制動意圖參數曲線與實車制動液量和壓力曲線相匹配。通過軟件的實車標定與匹配以及實車測試,結果表明:采用軟件自學習的新能源協調式再生制動系統,可以確保制動踏板感覺在有制動能量回收和無制動能量回收時的一致性。
0 引言
隨著油耗和排放日漸嚴苛的需求以及新能源車型的普及,驅動系統向低真空和無真空發展,電控制動助力器取代傳統真空制動助力器已成為制動系統發展主要趨勢,除了可以提供零真空制動助力,還可以實現再生制動踏板力調節以及主動制動等高級功能。踏板感覺是駕駛員在日常駕駛中最為敏感的,也是JDpower響應全球客戶呼聲權威調研機構中權重最高的一項。新型制動助力系統的應用,首先要提供安全可靠、良好的制動踏板感覺。隨著新能源車輛的推廣應用,再生制動功能成為新能源汽車的關鍵技術之一,而電控制動助力器的踏板力調節功能使得再生制動可以達到0.3g減速度。對于傳統車輛的制動過程,車輛動能轉化為制動器的熱能。對于新能源車輛可通過具備發電功能的電機轉化為電能,用來收集傳統車輛在制動和滑行過程中的能量浪費,也稱為再生制動回收,除改善燃油經濟性外,也可延長制動摩擦片的售后維護周期。由于再生制動為一個動態過程,再生制動過程中電控制動助力器如何提供穩定的踏板感成為必須要解決的關鍵問題。對于新能源車,再生制動回收可以分為滑行制動能量回收、疊加式制動能量回收以及協調式制動能量回收,而協調式再生制動減速度可以達到0.3g,滿足2021年CATC以及WLTC測試工況要求,成為再生制動技術的主要方向。關于再生制動,國內外已有相關研究,張京明等[1]針對混合動力汽車的再生制動系統的工作原理,依據理想的前后輪制動力分配曲線,基于比例控制策略,合理分配摩擦制動和再生制動力,實現更多的再生制動能量回收。胡勝、黃妙華[2]建立了駕駛員制動意圖模糊識別模型和基于遺傳算法的制動力分配優化模型,通過系統仿真,能夠有效提高制動過程中的能量回收率。何莉萍等[3]考慮了制動能量回收時駕駛員的安全性,提出了基于模糊神經網絡控制的汽車輔助再生制動系統,可以監控車輛與前車的相對距離和相對速度,來調節前輪的再生制動力,提高了再生制動過程中的車輛安全性。張雷等人[4]以分布式驅動電機汽車為研究對象,提出再生制動與液壓制動協調控制策略,以保證在電動汽車防抱死制動過程中的車輛穩定性。再生制動工況下的制動踏板感的調解,是再生制動客觀體驗的關鍵環節。張建亮、趙鍇鍇[5]針對再生制動系統踏板感覺模擬器,通過AMESim軟件仿真,得到了與傳統制動系統一致的制動踏板感覺。陳慶樟等[6]以傳統液壓制動踏板感為目標,采用軌跡跟蹤控制策略,建立了再生制動集成系統踏板控制模型。侯付來[7]對再生制動與液壓制動的協同控制策略和控制裝置進行了研究,運用AMESim搭建再生制動系統模型,研究影響制動踏板感覺的關鍵因素。
1 協調式再生制動模型
1.1 協調式再生制動原理
協調式再生制動工況,需要車輛的制動系統和驅動系統協調工作來實現。如圖1所示,以電控制動助力器以及電子穩定控制器ESC作為協調式再生制動的系統解決方案,可實現0.3g減速度的再生制動,滿足95%以上的日常制動工況,降低能耗,提升車輛續航里程。電控制動助力器通過軟件標定,可實現制動踏板感覺的調節,同時此電控制動助力器采用傳統助力器相同主缸,具有耦合的制動踏板以及明確的ABS路感。再生制動系統綜合考慮車輛穩定性狀態平衡摩擦力矩和再生制動力矩,基于電控制動助力器以及電子制動控制單元實現協調式再生制動,文中研究再生制動工況電控制動助力器制動踏板感覺。協調式再生制動系統主要功能如下:(1)通過踏板行程傳感器以及主缸壓力信號判斷駕駛員制動意圖;(2)提供制動助力功能,使得駕駛員用較小的踏板力達到所需車輛減速度,減輕駕駛員疲勞、提高駕駛舒適性,其電控制動助力器電機為制動助力動力源;(3)通過CAN總線分配再生制動力矩,通過制動液控制在卡鉗端產生的摩擦制動力。其再生制動力矩只能作用在驅動軸端,再生制動力矩大小跟車輛狀態有關,比如電池電量、電機再生制動能力、車輛穩定性狀態、駕駛員制動意圖等。協調制動能量回收系統僅在駕駛員踩下制動時工作,制動力由再生制動力和制動器摩擦制動力相疊加,使得其總和等于駕駛員的需求制動力。在協調式再生制動工況下,駕駛員踩下制動踏板后,制動液儲存在ESC的低壓蓄能器中,確保輪缸卡鉗端不建壓,以此電機的反向扭矩施加在輪端來提供車輛的對應減速度。以一輛車速120 km/h車輛進行0.25g減速度恒定制動為例,如圖2所示,由于電機具備高速恒功率低速恒扭矩特性,高車速時再生制動能力不足,則制動減速度由液壓制動和再生制動共同承擔;隨著車速的降低,電機再生制動能力增強,可全部由再生制動來承擔制動減速度,液壓制動減少,主缸壓力減小;由于低車速驅動系統散熱需求,再生制動能力緩慢降低到0,為了確保減速度恒定,液壓制動需要進行相應的補償,液壓制動增大,主缸壓力增大。在這個過程中由于再生制動為動態過程且實時變化,為了確保減速度等同于駕駛員需求,液壓實時進行調節,導致主缸壓力為動態變化的過程。除了受驅動系統再生制動能力的影響,主缸壓力還會受到車輛穩定性狀態的影響、駕駛員制動意圖的變化,從而需求根據理想的制動踏板感覺曲線和實施變化的主缸壓力,進行軟件調試,進而實現制動踏板力的平衡以及踏板力的穩定。
1.2 協調式再生制動踏板感覺模型
協調式再生制動的運用,需要考慮駕駛員制動踏板感覺的設計優化,即需要滿足在無協調式再生制動時和有協調式再生制動時的制動踏板感覺的一致性。電控制動助力器物理模型如圖3所示。由電控制動助力器物理模型可知,駕駛員通過踏板推桿輸入踏板力,電機助力通過小齒輪、大齒輪和滾珠絲杠機構將電機的旋轉運動轉化為絲杠的直線運動推動閥體,同時駕駛員踩制動踏板作用在輸入推桿的力可以推動反饋盤,輸入推桿和閥體共同將作用力施加在反饋盤上,推動主缸活塞移動,實現制動壓力的建立。踏板推桿與閥體的相對位移可以通過位移傳感器檢測,通過控制踏板推桿與閥體的相對位移大小,可以實現不同的電機制動助力比。在駕駛員踩下制動踏板時,踏板力和電控制動助力器電機助力共同克服制動液壓系統反力。根據BFI目標要求,可以通過電控制動助力器標定實時調整電機制動助力大小,根據力平衡原理,確保恒定踏板行程下駕駛員制動踏板輸入力保持不變。根據牛頓力學定律以及電控制動助力器的物理模型,通過受力分析,可以得到對應的電控制動助力的力學平衡方程如下:式中:Fpedal為駕駛員作用在踏板上的力;Fboost是通過電機作用的助力;Fspring是回位彈簧的作用力;Fhydraulic是主缸的液壓反作用力。由電控制動助力的力學平衡方程可知,對于選定的電控制動助力器,通過調節電機的助力大小,可以實現不同的制動踏板感,以及實現再生制動工況踏板力的調節。
2 基于協調式再生制動踏板感覺調節
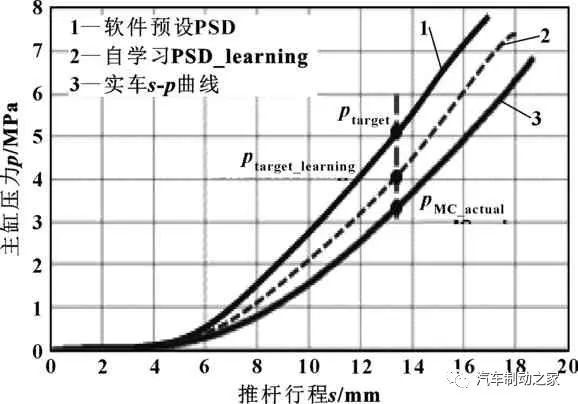
由協調式再生制動的工作原理以及電控制動助力的力學平衡方程可知,在制動能量回收的工況下,由于ESC將輪缸液量儲存入低壓蓄能器,電控制動助力器主缸的液壓反作用力Fhydraulic將下降,需實時控制踏板推桿與閥體的相對位移大小,以平衡駕駛員制動踏板力,保證制動能量回收時良好的踏板感覺一致性。制動踏板感覺依賴于制動系統p-V曲線,其中p為制動系統壓力,V為制動液流量,如圖4所示,p-V曲線可以轉化為推桿行程壓力曲線s-p曲線,如圖5所示,其中s為輸入推桿行程,p為制動系統壓力,以s-p曲線作為控制目標。再生制動工況過程中,根據s-p曲線計算一定推桿行程下虛擬的主缸壓力。以輸入推桿行程s=a為例說明,即駕駛員意圖的主缸壓力SPD(SP Demand)=pa0,進而得到整車所需的總的制動力矩。以再生制動力矩可以換算為pa2,那么實際液壓則對應于pa0-pa2,此部分液壓由ESC進行調節控制。當車輛制動踏板感覺BFI曲線設定之后,如圖6,BFI曲線包含了3組關系:踏板行程-減速度曲線,踏板力-減速度曲線,踏板力-踏板行程曲線;一定的制動系統,踏板行程-踏板減速度根據s-p曲線為確定的關系,那么踏板力是可調參數,設定了一組BFI1踏板力-踏板減速度曲線之后,那么踏板力和踏板行程關系則確定;通過調節不同減速度下對應的踏板力,可以得到不同的踏板力和踏板行程關系,如圖6中BFI2所示。以駕駛員的踏板推桿行程為輸入,基于PID控制的制動助力控制,實現制動踏板感控制,具體的協調式再生制動制動踏板感控制算法如圖7所示。由于實際的制動系統不同車輛之間p-V曲線一致性存在一定帶寬,并且同一輛車不同工況比如溫度不同,高速低速轉彎工況,卡鉗Cp值變化導致轉換的不同推桿行程對應的主缸壓力變化。由于再生制動工況,其摩擦制動液壓力計算來源于s-p曲線,為了確保有再生制動和無再生制動BFI線性度和一致性,需要獲取當前車輛準確的s-p曲線。為了獲取準確的s-p曲線,需要在低車速純摩擦制動工況下,根據主缸壓力傳感器得到的主缸壓力pMC_actual以及推桿行程傳感器獲取的推桿行程sactual進行迭代計算學習,得到SPD學習系數。控制算法中,SPD學習是根據不同車輛的實際制動系統建壓能力大小,不斷地將軟件內部預設的液量與壓力的相關曲線進行自學習,以靠近實際車輛的液量與壓力的曲線,具體學習過程如圖8所示。ESC在檢測到實際車輛的踏板行程與壓力的關系曲線與軟件內預設的曲線不一致時,會在純液壓制動工況下,選取3個不同推桿行程對應的點,通過如下算法將踏板行程壓力曲線不斷往實車曲線靠近,每個點選取40個pMC_actualy壓力值的平均值進行迭代。
3 試驗測試結果
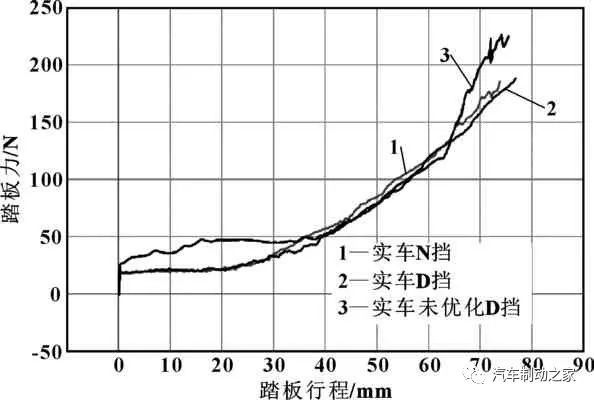
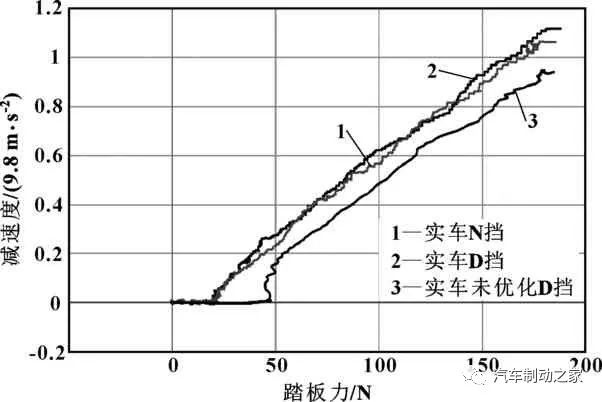
通過SPD自學習的算法應用以及實車的匹配與測試,得到車輛在不同擋位下的制動踏板感參數,由于N擋驅動系統是切斷狀態,驅動電機無法做電機制動,因此N擋可以模擬無制動能量回收工況下的制動踏板感,而D擋為驅動擋,可以得到制動能量回收工況下的制動踏板感。測試在車輛有制動能量回收和無制動能量回收下的制動踏板感,得到制動踏板感的對比如圖9—圖11所示,相比未優化前制動踏板感覺線性度以及一致性明顯提高。
4 結論
以新能源車協調式再生制動系統的制動踏板感為研究對象,針對協調式再生制動系統踏板感調節難的問題,提出基于軟件SPD自學習的算法,進行再生制動工況下的制動踏板感調節。運用基于電控制動助力器和ESC的協調式再生制動系統方案,通過對電控制動助力器控制策略的研究,并經過實車測試驗證,得到在有能量回收和無能量回收的工況下制動踏板感覺一致性較好的結論。
作者:朱玙熹,崔海峰,馬加奇
泛亞汽車技術中心
?